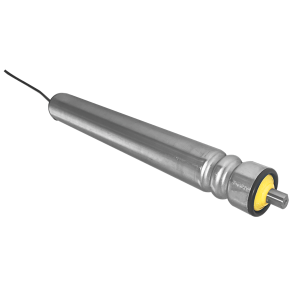







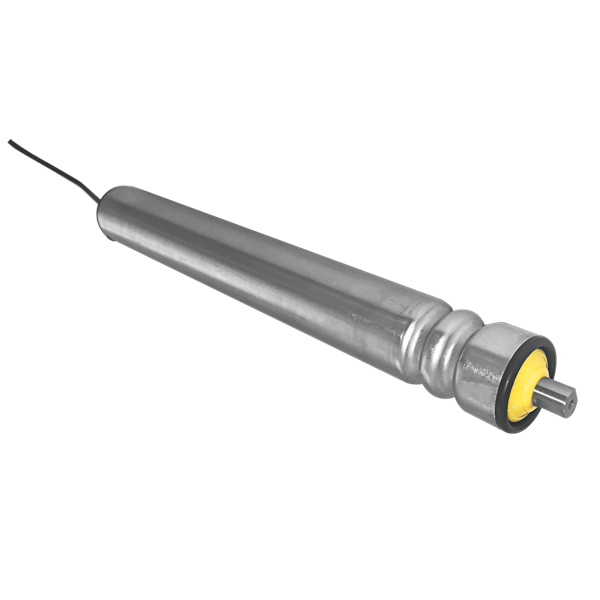


غلتک برقی براشلس BLD DC
| 1 | موتور وای جی شرکت Comanpy | |
| 2 | مدل و ابعاد | |
| نوع موتور | BL | |
| موتور بدون جارو | ||
| 3 | T: لوله فولادی کربن (که) مواد درام S: لوله فولادی ضد زنگ 304 | |
| 4 | قطر درام 50 میلی متر (مثال) 50: قطر درام 50 میلی متر | |
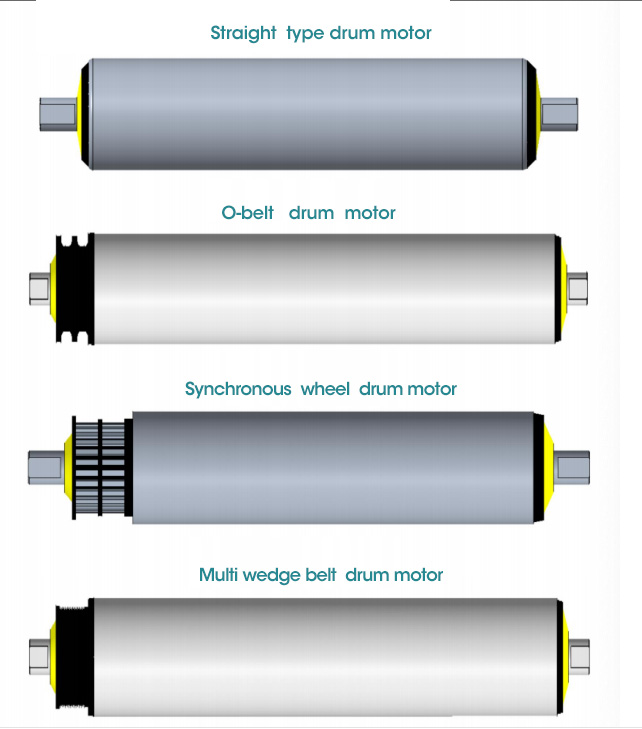
| 5 | شکل طبل | الف: لوله استوانه ای |
| 6 | سرعت خطی ( 25 متر در دقیقه (مثال) 25: سرعت خط چرخشی 25 متر در دقیقه | |
| 7 | طول درام (مثال) 400: طول کل 400 میلی متر (شامل نمی شود) | |
| 8 | توان نامی ( (مثال) 40: توان نامی موتور 40 وات | |
| 9 | نوع ولتاژ | D: منبع تغذیه DC 1: تک فاز AC |
| 10 | ولتاژ (مثال) 24:24 ولت | |
| 11 | نوع سیم سربی | نمایندگی جای خالی (که) |
| توان نامی (پیوسته) | W | 10 | |||
| سرعت نامی | r/min | 3000 | |||
| گشتاور نامی | نیوتن متر | 0.032 | |||
| حداکثر گشتاور لحظه ای | نیوتن متر | 0.048 | |||
| محدوده کنترل سرعت | دور در دقیقه | 200-3000 | |||
| محدوده کنترل سرعت | در بار | زیر 1٪: وضعیت 0-گشتاور، سرعت نامی، ولتاژ نامی، دمای اتاق | |||
| روی ولتاژ | زیر + 1٪: ولتاژ نامی وضعیت + 10٪، سرعت نامی، بار نامی، دمای اتاق | ||||
| روی دما | زیر %1 ±: شرایط دمای محیط 0~+40oC ولتاژ نامی، بار نامی و سرعت نامی | ||||
| ورودی برق | ولتاژ نامی V | / |/ |24VDC اختیاری 36VDCJ48VDC) | |||
| محدوده تحمل ولتاژ | ± 10% | ||||
| فرکانس هرتز | / | / | |||
| محدوده تحمل فرکانس | / | / | |||
| جریان ورودی نامی A | / | / | 0.7 | ||
| حداکثر جریان ورودی لحظه ای | A | / | / | 1.4 | |
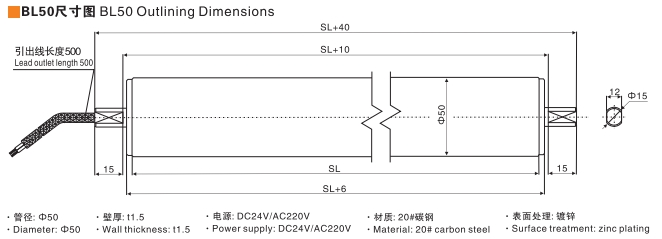
موتور درام با قطر خارجی (منبع تغذیه DC هنگام اعمال به 24VDC/36VDC/48VDC}
| توان نامی (پیوسته) | W | 40 | |
| سرعت نامی | r/min | 3000 | |
| گشتاور نامی | نیوتن متر | 0.127 | |
| حداکثر گشتاور لحظه ای | نیوتن متر | 0.191 | |
| محدوده کنترل سرعت | دور در دقیقه | 200-2500 | |
| محدوده کنترل سرعت | در بار | زیر 1٪: وضعیت 0-گشتاور، سرعت نامی، ولتاژ نامی، دمای اتاق | |
| روی ولتاژ | زیر + 1٪: ولتاژ نامی وضعیت + 10٪، سرعت نامی، بار نامی، دمای اتاق | ||
| روی دما | زیر %1 ±: شرایط دمای محیط 0~+40oC ولتاژ نامی، بار نامی و سرعت نامی | ||
| توان نامی (پیوسته) | W | 40 | |||
| سرعت نامی | r/min | 3000 | |||
| گشتاور نامی | نیوتن متر | 0.127 | |||
| حداکثر گشتاور لحظه ای | نیوتن متر | 0.191 | |||
| محدوده کنترل سرعت | دور در دقیقه | 200-2500 | |||
| محدوده کنترل سرعت | در بار | زیر 1٪: وضعیت 0-گشتاور، سرعت نامی، ولتاژ نامی، دمای اتاق | |||
| روی ولتاژ | زیر + 1٪: ولتاژ نامی وضعیت + 10٪، سرعت نامی، بار نامی، دمای اتاق | ||||
| روی دما | زیر %1 ±: شرایط دمای محیط 0~+40oC ولتاژ نامی، بار نامی و سرعت نامی | ||||
| ورودی برق | ولتاژ نامی V | / |/ |24VDC اختیاری 36VDCJ48VDC) | |||
| محدوده تحمل ولتاژ | ± 10% | ||||
| فرکانس هرتز | 50/60 | / | |||
| محدوده تحمل فرکانس | ± 5٪ | / | |||
| جریان ورودی نامی AA | 0.72 | 0.36 | 2.70 | ||
| حداکثر جریان ورودی لحظه ای | A | 1.4 | 0.55 | 5.60 | |
موتور براشلس به تنظیم سرعت ادامه می دهد و سیگنال بازخوردی از سرعت موتور برای تنظیم ولتاژ اعمال شده به موتور مقایسه می شود.بنابراین، حتی اگر بار تغییر کند، باز هم می توانید سرعت را از تنظیم لحظه ای آهسته به تنظیم کنید و به منظور تثبیت سرعت در حال اجرا.موتور القایی سه فاز با کنترل اینورتر کنترل فیدبک نیست، بنابراین بار بزرگتر می شود، سرعت بسیار زیاد خواهد بود.
کاهش؛برای الزامات پایداری در سرعت بالا، توصیه می شود از موتور بدون جاروبک استفاده کنید.
| توان نامی PW | سری جعبه دنده | نسبت کاهش i | حداکثر سرعت V m/min | سرعت نامی n دور در دقیقه | گشتاور مجاز T Nm | نیروی محرکه FN | L طول L میلی متر |
| 40 وات | یک مرحله | 3.65 | 129 | 821.9 | 0.420 | 16.80 | N260 ~ 800 |
| 5.36 | 88.0 | 559.7 | 0.610 | 24.40 | |||
| 6.55 | 72.0 | 458.0 | 0.750 | 30.00 | |||
| 8.63 | 54.6 | 347.6 | 0.990 | 39.60 | |||
| دو مرحله ای | 13.53 | 35.0 | 221.7 | 1.390 | 55.60 | 2270 ~ 800 | |
| 18.92 | 25.0 | 158.6 | 1.950 | 78.00 | |||
| 24.65 | 19.0 | 121.7 | 2.540 | 101.6 | |||
| 28.05 | 16.8 | 106.9 | 2.890 | 115.6 | |||
| 33.92 | 14.0 | 88.40 | 3.500 | 140.0 | |||
| 44.69 | 10.5 | 67.10 | 4.610 | 184.4 | |||
| 58.22 | ساعت 8.00 | 51.50 | 6000 | 240.0 | |||
| سه مرحله | 67.08 | 7.00 | 44.70 | 6.240 | 249.6 | N290 ~ 800 | |
| 81.11 | 5.80 | 37.00 | 7.540 | 301.6 | |||
| 91.36 | 5.00 | 32.80 | 8.490 | 339.6 | |||
| 102.88 | 4.60 | 29.20 | 9.560 | 382.4 | |||
| 118.98 | 4.00 | 25.20 | 11.06 | 442.4 | |||
| 145.36 | 3.20 | 20.60 | 13.51 | 540.4 | |||
| 165.64 | 2.80 | 18.10 | ساعت 15.00 | 600.0 | |||
| 231.61 | 2.00 | 12.90 | ساعت 15.00 | 600.0 | |||
| 301.68 | 1.50 | 9.900 | ساعت 15.00 | 600.0 |
آهنربای دائمی در روتور موتور براشلس استفاده می شود که می تواند تلفات ثانویه روتور را کاهش دهد.بنابراین، در مقایسه با موتور القایی سه فاز با تبدیل فرکانس، مصرف برق بیش از 20٪ کاهش می یابد که منجر به صرفه جویی در انرژی می شود.